随着我国经济的快速发展,对于江、河、湖、海水资源的开发和利用越来越受到重视。大中型水电站、大坝、桥梁的修建与维护,以及近海资源探测、利用等方面,对能够在湖泊、河道、近海等浅水环境穿行作业的超小型水下机器人的需求不断增加。同时,工业废弃物和生活垃圾所造成的水环境污染已经到了触目惊心的程度,严重地威胁着河道安全和人们的健康,也对经济的可持续发展产生重大的威胁,迫切需要一种可以清除水面垃圾的先进环保设备。
针对大中型水电站、大坝、桥梁的修建与维护、近海资源探测以及湖泊、河道进行治理的需求,本学科机器人系统科研团队依托江苏省特种机器人重点实验室,研制了水下构筑物探测机器人系统以及水质监测与垃圾清理相关的水面清理特种机器人。
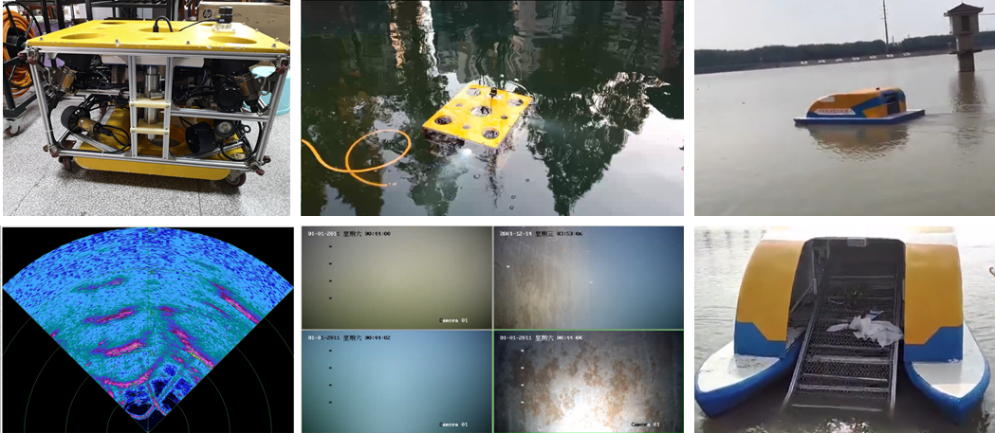
研制的水下构筑物探测机器人系统,针对ROV受力面复杂,易受水流干扰的问题,研究采用计算流体动力学仿真软件FLUNET,针对水下ROV机器人进行了受力分析;针对浅水环境下ROV运动时受到扰动问题,通过理论试验分析建立ROV的控制模型,提出多通道主动轮廓模型的裂纹提取算法,并基于模糊PID和滑模自适应控制的水下机器人控制系统;针对声纳成像斑点噪声突出、分辨率较低特点,研究声纳图像降噪与超分辨处理技术,探索了多源异构图像融合技术及三维重建技术。水下构筑物探测机器人系统采用8推进器布局,自由度高,控制灵活,冗余性好;开架结构,便于搭载其他探测和作业设备;具备翻转、贴壁、侧壁爬行等操作能力;采用万向轮与避免接触减少阻力,可配置清刷盘对表面附着物进行适度清刷。配置水下多路照明摄像系统,可满足多角度实时观测、记录的需求。在九圩港船闸下游闸门等地区,实现水下构筑物缺陷检测,开展预防性修复作业,提升多传感器融合检测技术水平。
研制的无人垃圾清理船进行垃圾收集装置、破碎装置和压缩装置的创新结构优化设计,以及船体的轻质高强结构设计。研究传感信息的高效滤波算法和快速解算算法,实时 获取机器人的回转、俯仰和偏移信息,以及机器人的位置坐标和速度信息;设计基于误差模型的自适应模糊控制。结合水面机器人的局部定位导航系统,研究全局地图与局部定位信息的有效融合算法,设计适合水面机器人的自主路径规划方法;采用视觉和激光雷达等传感器构建双模识别模块,研究不同类型和形状垃圾的识别方法,实现水面垃圾的自动识别。
研制的集成切割、清漂、旋挖式清淤等功能的水面清理机器人,已在新疆罗布泊盐湖、昆山阳澄湖、温州蒲州河、诸暨石壁水库和青山水库中进行了多年应用,其旋流泵效率从27%提升至57%以上,有效降低了清淤功耗。
研究成果解决了多项关键技术问题,承担了“水面垃圾清理与水质监测特种机器人研制”以及“水环境立体整治机器人研发”等20余项项目。其中,水环境工程化高效清理成套装备项目的研发,打破了国外产品的技术垄断,直接经济效益达10549万元。上述成果获得安徽科技进步奖三等奖1项和江苏省科技进步三等奖1项。